and the distribution of digital products.
Fictitious Play for Mixed Strategy Equilibria in Mean Field Games: Stopping and Obstacle Issue
:::info Authors:
(1) Chengfeng Shen, School of Mathematical Sciences, Peking University, Beijing;
(2) Yifan Luo, School of Mathematical Sciences, Peking University, Beijing;
(3) Zhennan Zhou, Beijing International Center for Mathematical Research, Peking University.
:::
Table of Links2 Model and 2.1 Optimal Stopping and Obstacle Problem
2.2 Mean Field Games with Optimal Stopping
2.3 Pure Strategy Equilibrium for OSMFG
2.4 Mixed Strategy Equilibrium for OSMFG
3 Algorithm Construction and 3.1 Fictitious Play
3.2 Convergence of Fictitious Play to Mixed Strategy Equilibrium
3.3 Algorithm Based on Fictitious Play
4 Numerical Experiments and 4.1 A Non-local OSMFG Example
5 Conclusion, Acknowledgement, and References
2 ModelIn this section, we introduce the PDE system for the mixed strategy equilibrium of mean field games with optimal stopping (OSMFG). We first present the single agent optimal stopping problem, and the PDE for the value function, and we proceed to introduce the OSMFG framework. The non-uniqueness of agents’ optimal strategies leads to multiple notions of equilibrium. We define the pure strategy equilibrium and its PDE system, but this equilibrium does not always exist due to the singular control. Thus we relax the constraint on agent choices and define the mixed strategy equilibrium. The PDE system for the mixed strategy equilibrium is presented at the end.
2.1 Optimal Stopping and Obstacle Problem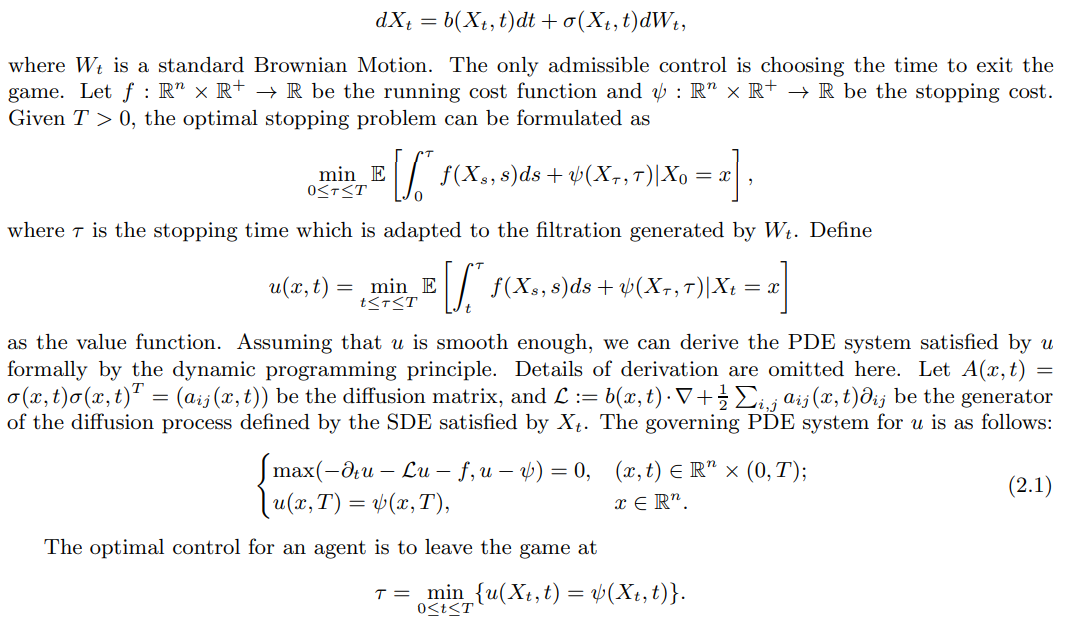
\ That means an agent would leave the game at time t and state x if and only if (x, t) ∈ {(x, t) : u(x, t) = ψ(x, t)} (or {u = ψ} for simplicity). We note that in some regions of {u = ψ}, agents might be indifferent between leaving the game and remaining in the game as they would obtain the same cost in either case. (2.1) is an obstacle problem. It is a free boundary problem, in which u solves some PDEs with boundaries relying on the solution itself. The obstacle problem has been studied a lot since the 1980s. For more details on it, we refer to Chapter 5 of [11].
\
:::info This paper is available on arxiv under CC 4.0 license.
:::
\